Hos Daloon i Nyborg anvendes dagligt mellem 15 og 20 tons kål til produktionen af omkring en million forårsruller. Det har hidtil været en forholdsvis manuel proces, men nu skal en robotløsning fremover håndtere de mange kålhoveder
Antallet af rullende kålhoveder hos Danmarks forårsrulleproducent overgår de flestes vildeste fantasi; der håndteres dagligt et sted mellem 15 og 20 tons kål hos Daloon. De bliver alle drejet, vejet og vurderet i hænderne på Nyborg-fabrikkens medarbejdere for derefter at ende i forårsruller, der bliver serveret i hele Skandinavien og flere steder i det nordlige Europa.
-Vi producerer cirka en million forårsruller hver dag, hvor vi selvfølgelig bruger en masse råvarer – blandt andet en masse kål. Vi håndterer dagligt mellem 15 og 20 tons kål, fortæller Peter Madsen, der er teknisk chef ved Daloon.
-I dag er vores proces forholdsvis manuel. Der er altså en masse ensidigt og gentagende arbejde omkring håndteringen af de store mængder kål, som vi egentlig gerne vil have løst, forsætter han.
Derfor har systemintegratoren Technicon sammen med Teknologisk Institut udviklet en prototype på en robotløsning i regi af EU-projektet agROBOfood. Løsningen skal på sigt gøre håndteringen af kål mere produktiv, mindske madspild og fjerne den hårde opgave fra medarbejderne.
-Kålhoveder er jo et naturligt produkt. Så de varierer i størrelse, diameter og udformning, og derfor er det vanskeligt at lave en maskine, som håndterer kålhovederne ens. Og det er dér, hvor robotløsningen kommer ind som en god idé, slår Peter Madsen fast.
Det er ikke første robotløsning, som Daloon får i sin produktion. Faktisk har hele 34 robotter hjemme hos den fynske forårsrulleproducent – de fleste af dem som pick and place-robotter.
-Men lige nøjagtig denne proces med kål har vi ikke automatiseret endnu. Vi har nemlig haft utrolig svært ved at finde den helt rigtige løsning til det, fordi produktet varierer så meget, som det gør, fortæller Peter Madsen.
Håndtering af skrøbelige kål
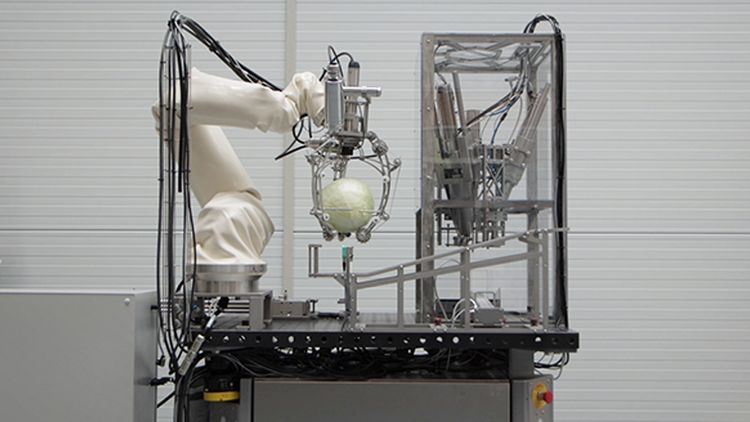
Samarbejdende robotter, de såkaldte kollaborative robotter eller cobots, skåner medarbejderne for nedslidende arbejdsopgaver, de er fleksible, og de kan håndtere sarte emner. Og derfor er det også netop denne form for robot – kombineret med kameraer og kunstig intelligens – som kan tage hånd om kålhovederne hos Daloon.
-Løsningen består af tre hovedelementer: et robotskin, som gør, at vi kan få den kollaborative robot ind i fødevareproduktionen, en griber til at håndtere grøntsager af forskellige størrelser – og endelig et vision-system, som hjælper med kvalitetskontrol og orientering af grøntsagerne, fortæller Mads Eskelund Kristensen, der er teknisk projektleder hos Technicon.
Seniorkonsulent hos Teknologisk Institut Carsten Panch Isaksen uddyber:
-Det centrale i løsningen er den måde, som vi har anvendt kameraer og kunstig intelligens til at finde kålhovedet og stokken. I dag ved systemet ikke, hvilke størrelser kålhovederne har og derfor bliver de udboret på samme måde alle sammen. Med det nye system kan vi beregne, hvor meget af kernen, der skal udbores og dermed reducere spildet.
Fremtidens fødevareindustri
I fødevareindustrien er det blandt andet vigtigt for kvaliteten, at alle faser af bearbejdning og håndtering foregår ensartet, varsomt og hygiejnisk – alle opgaver, som robotter er ideelle til at klare.
-Det, at vi nu har fået et skin til de kollaborative robotter fra Universal Robots, gør, at vi kan få den ind i fødevareindustrien. Det ser jeg et stort potentiale i, fortæller Mads Eskelund Kristensen.
Og det giver Peter Madsen fra Daloon ham ret i:
-Teknologisk Institut og Technicon er virkelig kommet med nogle gode input her, og det har givet os alle sammen et løft. Det har gjort, at vi kan håndtere fødevaren meget mere nøjagtigt.
AgROBOfood – der er finansieret af EU’s Horizon 2020-program – har til formål at flytte robotter ind i fødevareindustrien blandt andet ved at yde økonomisk støtte via åbne projektkald til selve udviklingsarbejdet.